


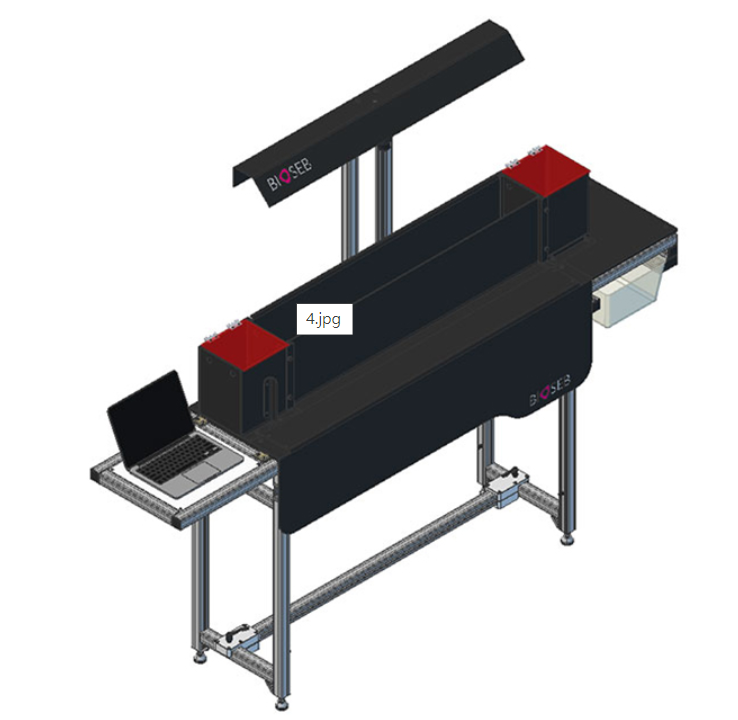
Bioseb 利用獨有的“Pressure Sensor-mat”技術進行運動學分析,可以獨立監測行走動物每隻腳爪的重量負荷。KWB 系統還整合了影像監控系統,可以實時對動物運動狀態進行監測,動物的行走隔間內含有不少於4000 或6000 個傳感器,傳感器數量取決於行走隔間的長度。
KWB 步態分析系統廣泛地應用於中樞神經系疾病的行為學表現判定,例如腦缺血、神經退行性疾病、脊髓損傷模型和一些神經創傷疼痛模型(Nerve Crush,SNI…)等。
KWB 系統提供自動參數分析功能,可分析每隻腳爪的最大力量(mN)、質量速度(N/s)和最大接觸表面積(cm2) 等。此外,還可以分析行走速度、節奏、重疊和踏步模式圖等,這些參數均進行統計學處理和對比。KWB 系統也可批量處理實驗結果,節省分析時間,使結果具有更好的一致性。
Bioseb 已經證明不同動物模型之間的腳爪最大力量上升時間是不同的, KWB 可以對比每隻動物行走時的幾何重心和實際的重量重心路徑,並展示其顯著差異。系統也可測量前後、左右腳爪間的重量分佈和對側補償等,因此可以為傷害感受和鎮痛研究提供有用的信息。
- 應用於中樞神經系疾病的行為學表現判定,例如腦缺血、神經退行性疾病、脊髓損傷模型和神經創傷疼痛模型(Nerve Crush, SNI…)等
- 實時、連續地監測和追踪囓齒動物運動時的腳爪上的承受重量、速度和加速度等信息
- 提供運動協調性的數據以及不同腳爪之間、不同踏步之間的步態信息對比
- 主動步態系統,監測動物自由活動下的步態系統。
- 獨有的“pressure sensor-mat”技術,獨立測量動物腳爪在行走時的壓力(g)
- 整合了影像監控系統,可以識別動物膚色,實時對動物運動狀態進行監測
- 不少於4000或6000個傳感器,數量取決於行走隔間的長度
- 可以分析最大力(mN)、質量速度(N/s)和最大接觸面(cm2)、行走速度、節奏、重疊和踏步模式等,並進行統計學處理和對比
- 每隻腳爪可以獨立給出“病態”曲線,每個腳步可以通過不同的顏色識別
- 批量處理實驗結果,節省分析時間,使結果具有更好的一致性
- 記錄並對比幾何重心和實際的重量重心路徑,並展示其顯著差異
- 可測量前後、左右腳爪間的重量分佈和對側補償等,為傷害感受和鎮痛研究提供有用的信息
- 同一應用界面可同時進行實時分析和過程回顧
- 適用於任何毛色的大鼠、小鼠
- 可現實每次測試的結果和多次跑步的平均結果
- 軟體自動識別動物步幅,並以不同顏色進行標識
- 前段牆壁易移除進行清潔,跑步隔間寬度可調,目標區可安裝動物籠室
- 測量參數包括標記步幅/總步幅、步幅(踏步)數量、動物行走速度、腳爪速度、步幅節奏、前後錯步、左右重疊、動物重量(g)、平均力/重量比、腳爪峰值力/動物重量、腳爪接觸面峰值、步長、擺動時長、觸地時長、推進時長、步幅時長、任意兩個參數比……
- 小鼠跑道尺寸不低於550mm,大鼠跑道尺寸不低於1200mm,且可以調節相互更換和進行長度調節以適用不同動物
- 攝像機:HDUSB,640 x 480
- 採樣率:傳感器100 Hz,攝像機30 Hz
- 供電:傳感器和攝像機均通過USB接口供電
- Scored prints/total
- Steps number for each paw
- Animal speed
- Paw speed
- Cadence
- BoS front rear
- Overlap left/right
- Animal weight (g)
- Mean forces/weight ratio
- Peak force for each paw/animal weight
- Peak surface for each paw
- Stride length /paw
- Swing duration /paw (s)
- Stance duration/ paw (s)
- Propulsion duration /paw (s)
- Step duration /paw (s)
- Ratio of any 2 parameters
https://www.bioseb.com/en/activity-motor-control-coordination/1858-kinetic-weight-bearing.html
